Collision-free Tool Motion Planning
Animation of the collision detection algorithm described in Collision-free Tool Motion Planning for 5-Axis CNC Machining with Toroidal Cutters. See the GitHub project for more!
Hi everyone! My name is Juan Zaragoza Chichell. I am currently a final year PhD student in Computational Mathematics at BCAM - Basque Center for Applied Mathematics under the supervision of Dr. Michael Bartoň.

My current research involves computational geometry and solid, geometric, and physical modeling, with an aim in smart manufacturing, in particular CNC machining and 3D printing.
I focus on algorithmic toolpath planning and motion optimization for complex free-form surfaces, targeting higher surface quality, shorter machining times, and collision detection in the path-planning stage.
As part of my PhD studies, I undertook a research stay at Concordia University under the supervision of Prof. Tsz Ho Kwok, funded by the Mitacs Globalink Research Award.
As part of the activities I've conducted during my PhD studies, I also received a fellowship to participate in the ACM Europe Summer School 2024 on "HPC Computer Architectures for AI and Dedicated Applications".
I obtained my BSc in Mathematics from Universidad de Salamanca (2021) and my MSc in Mathematical Research from Universitat Politècnica de València (2022).
Before starting my PhD, I worked as a museum guide at the Museo Universitario Didáctico Interactivo de Ciencias (MUDIC) in Orihuela, my hometown, where I developed a passion for science communication and public engagement with mathematics and science.
My PhD research is funded by the Severo Ochoa fellowship (PRE2021-099981).
In my free time, I enjoy hiking and climbing, photography and cooking (I probably make the best Spanish Tortilla at this side of the Greenwich Meridian!).
Selected research prototypes and visual demos from recent work.
Animation of the collision detection algorithm described in Collision-free Tool Motion Planning for 5-Axis CNC Machining with Toroidal Cutters. See the GitHub project for more!
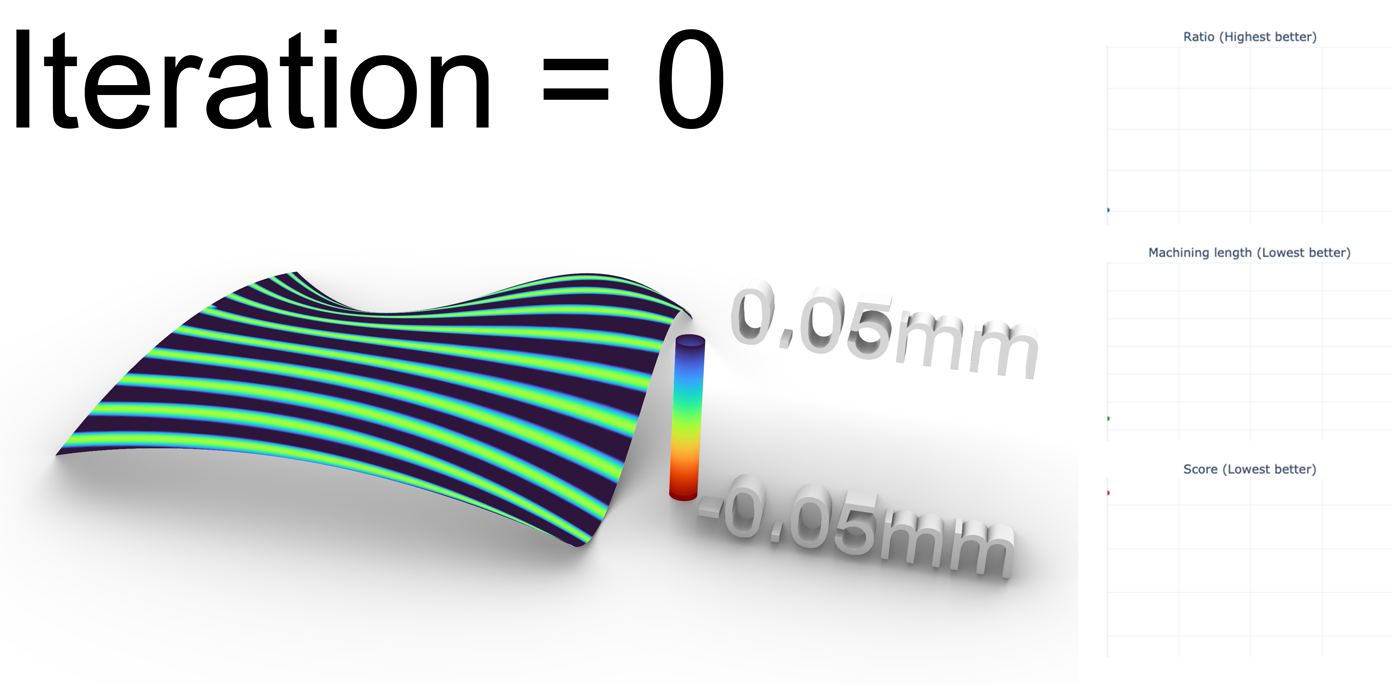
Animation of the optimization process described in Evolution-based tool path and motion planning optimization for 5-axis CNC machining of free-form surfaces. See the GitHub project for more!.
Feel free to reach out for collaborations or any type of discussion!